Lauantaina 4.5. Päiviöntiellä kivijalkakaupan tyhjennysmyynti sekä Huutokauppahulinat!!
Projekti: FTX Mauler Elektroniikka päivitys
Projekti: FTX Mauler Elektroniikan
päivitys

FTX Mauler on Rock Racer tyyppinen
sekoitus Crawlingautoa ja vauhdikkaampaa Rock Buggyä. Tarkoitus on
päivittää autoon parempi nopeudensäädin, radiolaitteisto sekä
ohjausservo. Nopeudensäätimeksi valitsimme Hobbywing 80A Crawling säätimen, joka on osoittaunut varsin monipuoliseksi säätimeksi
hyvin säätömahdollisuuksineen. Mauler on varustettu vakiona 2in1
tyyppisellä radio/nopaudensäädin yksiköllä, josta syystä
nopeudensäätimen päivitys pakottaa myös päivittämään
radiolaitteiston samalla. Radiolaitteistoksi valitsimme
perusluotettavan Etrnonix radion, jolla pärjää hyvin
normaaliajossa. Mikäli haluaisi lisätä vinssin tai ohjelmoitavia
valoja tulisi valita useampi kanavainen radio Esim. Sanwa MT-44. Ohjausservoksi valitsimme uuden harrastajaystävällisesti
hinnoitellun Highest DT450 servon muovikuorilla. Servo tarjoaa n.15kg
väännön ja on osoittautunut myös vahvaksi nopeaissa-autoissa.

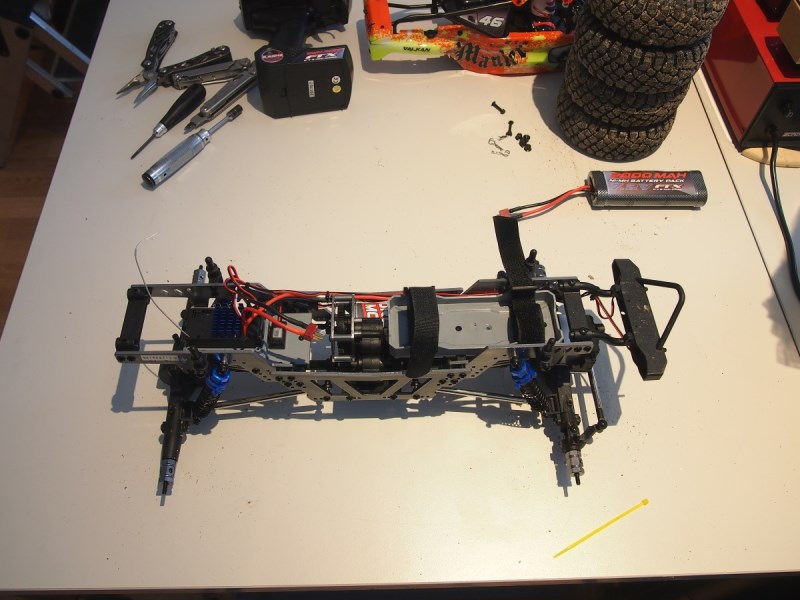
- Aloitimme projektin purkamalla autosta ensin renkaat ja korin pois. Rungon pyörittely pöydällä on mukavampaa, kun komponentteihin pääsee esteettömästi käsiksi ja likaiset renkaat eivät sotke joka paikkaa.
- Renkaat irtoavat normaalilla 7mm hylsyavaimella.

- Korin irroitukseen tarvitaan ristipääruuvimeisseli (PH1) ja 5.5mm hylsyavain tai kiintoavain. Kori kannattaa irroittaa saranan kohdalta (ympyröity kuvassa) jolloin korin saa kokonaan irti

Auton ollessa purettu sähköjen purku
ja asennus onnistuu esteettömästi.
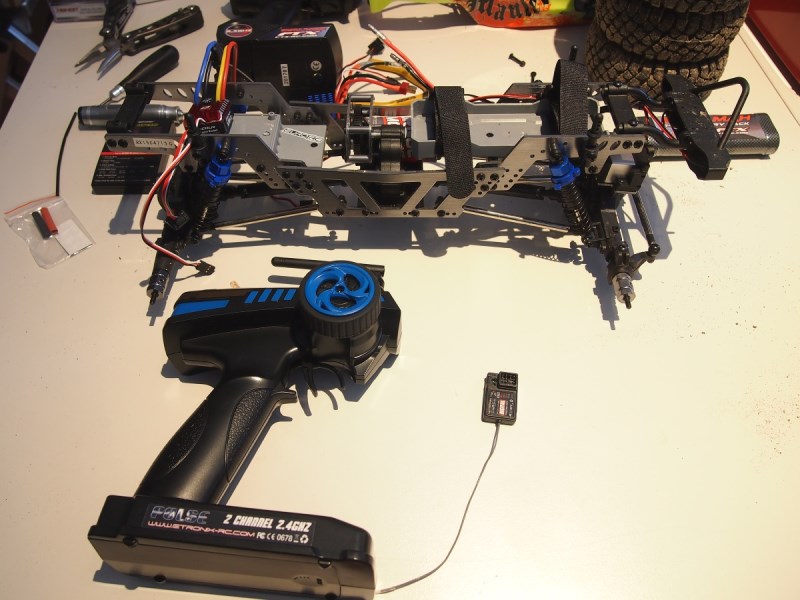
- Ensimmäisenä irroitetaan 2in1 nopeudensäädin/vastaanotinyksikkö. Huomioitavaa että vastaanotinyksikössä on servon liitäntää varten kiinteä jatkojohto (uutta servoa asentaessa tarvitaan jatkojohto) ja ajovaloilla oma liitäntänsä.

- Tarkoitus on asentaa nopeudensäätimeksi Hobbywing Quicrun Crawling säädin. Säätimen mukana toimitetaan ohjelmointikortti ja säätimessä on vakiona tukevampi XT60 virtaliitin. Huom! Virtaliitin on eri, kuin vakioakussa. Vakioakun käyttäminen edellyttää liittimen vaihdon

- Radioiksi tulee 2.4GHz Etronix 1060 perusradio, joka riittää normaaliin käyttöön hienosti.
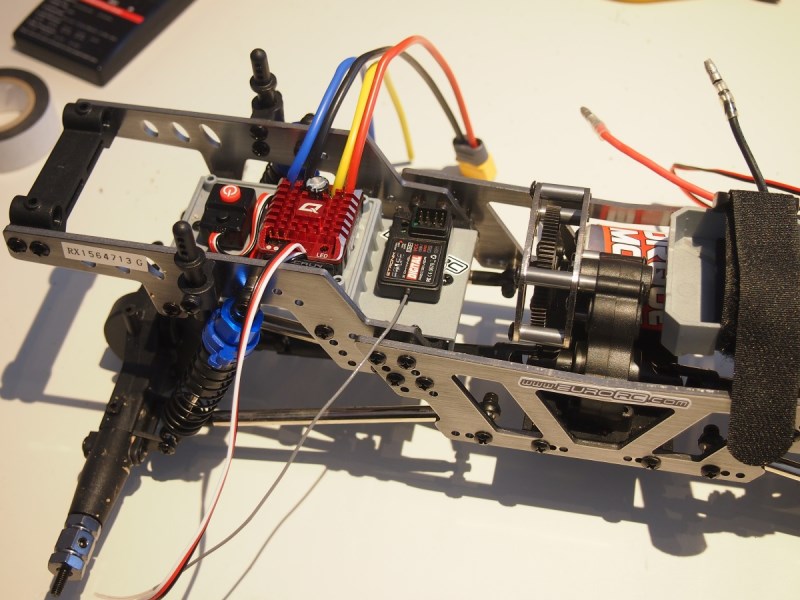
- Asensimme kaksipuoleisella teipillä nopeudensäätimen ja vastaanottimen taka-akselin päällä olevalle tasolle. Päädyimme asentamaan vastaanottimen etummaiseksi jolloin saimme servon kytkettyä lyhyemmällä jatkojohdolla.
- Jatkojohdon valmistimme käyttämällä vanhasta servosta otettua johdinta johon tarvitsi lisätä vain naaras Futaba servoliitin.

- Nopeudensäätimen liitimme moottorin johdot juottamalla. Katkaisimme ensin moottorilta tulleet johdot liittimien tyvestä. Johtojen kuorinnan jälkeen juotimme säätimen ja moottorin johdot yhteen. Juotoksien suojaukseksi käytimme kutistesukkaa. Huomioitavaa että moottorin johdot tuli juottaa ”väärinpäin” (keltainen mustaan ja punainen siniseen), jotta saimme moottorin pyörimissuunnan oikeaksi. Huom! Suurimman osan harjallisista moottoreista voi kytkeä molemmin päin. Näin ollen pyörimissuunta vain vaihtuu. Tarkista kumminkin moottorisi ohjeesta mahdolliset rajoitukset.

- Tämän jälkeen purimme alkuperäisen servon pois paikaltaan. Servon irroituksessa tarvitaan ristipääruuvimeisseliä (PH1)


- Asennettuamme uuden Highest DT450 servon paikalleen kytkimme sen ensin vastaanottimeen keskittämistä varten (kanava CH1).

- Seuraavaksi kytkimme autoon virrat päälle tarkistaaksemme radiolaitteiston parituksen (uudet radiot ovat valmiiksi paritetut keskenään), kalibroimme nopeudensäätimen ja keskitimme ohjausservon.
- Ensin kalibroimme nopeudensäätimen. Hobbywing Crawling säätimen kalibrointi käy nopeasti virtakytkimen vieressä olevan ohjelmointinapin kanssa.
- Kytketään ohjain päälle (varmista että kaasun Trim on 0-kohdassa)
- Käynnistetään nopeudensäädin pitämällä SET-nappi pohjassa – Säädin alkaa piipittämään
- Kaasuliipaisin vapaalla → paina Set nappia → Säädin piippaa kerran
- Kaasu pohjaan → paina Set nappia → Säädin piippaa 2X
- Jarru pohjaan → paina Set nappia → Säädin piippaa 3X
- Sammuta säädin ja käynnistä uudestaan ja testaa että kaasu ja jarru toimii normaalisti.
Säädin on nyt kalibroitu.
- Ohjausservon keskityksen jälkeen
asensimme uuden alumiinisen servovarren (25T) paikalleen.
Ohjauslinkin kiinnittämisen jälkeen säädimme ohjaimen Dual Rate
säädöllä ohjauksen liikeradat autolle sopivaksi.
Huom! Ohjausservon asennukseen liittyen löytyy oma artikkelinsa.

- Valojen virtajohdon kytkimme vastaanottimen ”Batt” kanavaan, josta saamme valoille tarvittavan virran. Merkitty kuvaan vihreällä.

- Seuraavaksi sidoimme moottorinjohdot runkoon kiinni nippusiteillä.
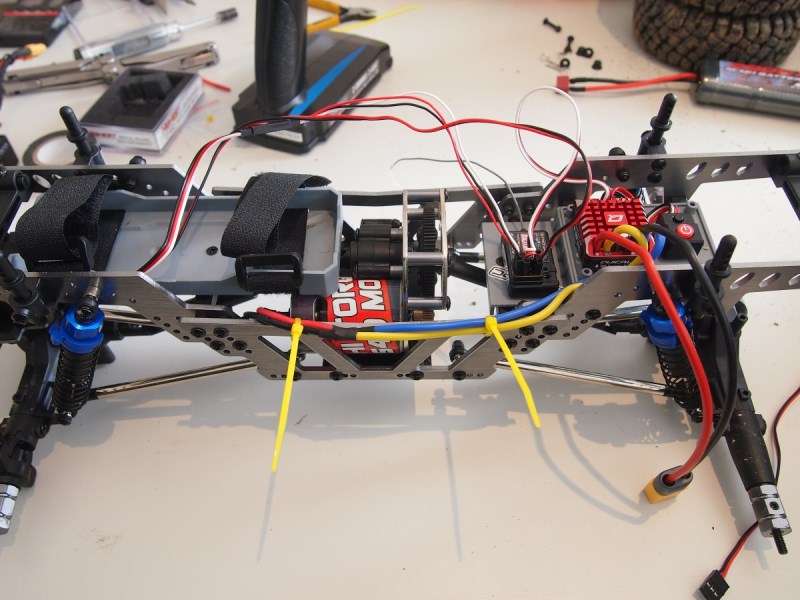
- Tämän jälkeen sidoimme servon ja valojen johdot omilla nippusiteillään runkoon. Näin ollen mahdollisissa huoltotoimissa ei koko johto nippua tarvitse irroittaa huoltoa varten.

- Lopuksi sidoimme virtajohdon vielä toiselle puolelle runkoa jolloin johdot eivät kulje kaikki samalla puolella. Siististi runkoa pitkin kulkevat johdot ovat myös käyttöturvallisemmat, kun risukossa ajettaessa ne eivät takerru tikkuihin.

Virtakytkin on nyt sijoitettu
taaimmaiseksi helpottaen virtojen kytkemistä, kun koria ei tarvitse
erikseen avata virtojen kytkemistä varten.

Ja näin Mauler on akun latausta vaille valmis koeajolle. Koeajolla säädetään ohjauksen trimmi ja tarpeen tullen muutamme nopeudensäätimen jarrun asetuksia.

Tietoa meistä
Ajankohtaista
Yhteystietomme:
EuroRC Oy
Päiviöntie 8
12400 Tervakoski
044-3397420
[email protected]
www.eurorc.com
FI23527868
Maksutavat












Toimitustavat
