Lauantaina 4.5. Päiviöntiellä kivijalkakaupan tyhjennysmyynti sekä Huutokauppahulinat!!
Näin kasaat 250 racing quadin
FPV racing kitti sisältää varsinaisen rungon tarvikkeineen, 1806 2300kv moottorit, 10A nopeudensäätimet
SimonK firmiksellä, virranjakolevyn, sekä Acro Naze32 lennonohjain kortin.
Runkokitti sisältää tarvittavat osat ja tarvikkeet ja myöskin kelvollisen räjäytyskuvan.

Artikkelin tarkoitus on kasata kitti yhdellä tavalla, tapojahan on kuitenkin lähes niin monta
kuin kasaajaakin.

250 Runko
Hiilikuitulevyjen reunat kannattaa hioa kevyesti esim. N:o 400 vesihiomapaperilla kera veden,
jolloin välttyy hiilaripölyltä, eikä terävät reunat aiheuta vahinkoa sormille tai sähköjohdoille.
Reunoihin voi niin halutessaan laittaa hieman pikaliimaa, jolloin saa kestävämmän reunan ja
näyttää siistiltä.
Sitten kasaamaan, eli rungon keskilevyn varsien kiinnitysreikiin laitetaan M3x16mm pultit
kanta ylöspäin ja alapuolelle asennetaan varret, ja sen jälkeen pultti ja varsi lukitaan paikalleen
alumiinitolpalla H5. Tolpassa ei ole mitään avainväliä, joten jotain pehmustetta pihtien kärkien
välissä apuna käyttäen kiristä tolpat ja pultti paikalleen.
Itse kiinnitin tässä vaiheessa moottorit varsiin ja silmäilin nopeudensäätimien ja virranjakolevyn
paikkoja.
Moottorit voi asentaa mustilla ruuveilla jotka tulevat moottorien mukana tai runkokitin mukana
tulevilla kiiltävillä ruuveilla. Jos tässä vaiheessa jo asennat motit lopullisesti, laita tippa lukitetta
pulttien kierteisiin, älä kiristä liikaa.

Itse laitoin noparit varsien yläpuolelle, mahtuvat jotenkin myös alarunkojen väliin, mutta tulee melko
ahdas asennus. Noparit kiinnitin vain nippusiteellä varsien ympäri.

Virranjakolevyn laitoin runkojen väliin ja naze32:n rungon yläpuolelle samoilla pulteilla, kiinteästi
kiinni runkoon, eli ei mitään joustavaa ainetta välissä. M3 pulttija 4kpl ja väliprikkoina toimii
muoviset potkuriadapterit omasta laatikosta.


Virranjakolevyn ollessa paikallaan juottelin noparien virtapiuhat jakolevyyn, yhdet piuhat 12V ulosottoon
kameraa ja videolähetintä varten, sekä johdot akulle. Tutki juotokset ja se ettei mikään kohta
virranjaosta ota hiilikuiturunkoon kiinni. Testaa myös alimmaisella runkolevyllä että kaikki
mahtuu paikalleen. Akulle meneviin johtoihin itselle mieleisin virtaliitin juottaen paikalleen.
Suojasin juotokset Plasti Dipillä.

Moottorien pyörimissuunnat lienee hyvä tarkistaa jossain vaiheessa, itse tein sen ja kaasun kalibroinnin
ilman nazen läsnäoloa. Juotin jokaisesta moottorista yhden johdon lopullisesti ja muut vaan tilapäisesti.
Noparit voi kalibroida suoraan myös nazesta, aiheesta videoita YouTubessa.
Moottorien järjestys ja pyörintäsuunnat alempana tekstissä ja nazen manuaalissa.
Vastari esiin, noparin ohjausjohto vastariin, mankkaan virrat ja virtaa noparille virranjaolta.
Jos savua tai kipinöitä ei ilmene, pitäisi moottorin pyöriä, olettaen että olet bindannut vastarisi.
Tarkista kaikkien mottien pyörintäsuunnat, korjaa tarvittaessa ja juota lopullisesti piuhat moteilta
nopareille, suojaa juotokset esim. kutistesukalla. Vaihtamalla kahden johdon paikkaa moottorille vaihdat sen pyörimis suuntaa.
Noparit kalibroin perenteisesti, eli yksi noparin johto kerrallaan vastarin kaasukanavaan, mankka päälle,
kaasu täysille, virtajaon akkuliitin kiinni, kuunnellaan piippaukset, kaasu mankasta pois, uudet piipitykset
ja virrat pois. Sama juttu kaikille neljälle tai käyttäen sopivaa servohaarapiuhaa kaikki 4 kerralla.
Acro Naze32
Nazen ohjeita ja manuaaleja netti pullollaan, ohjeita mm. Multikopterit.net:ssä, joten en tässä siihen
hirveästi puutu, mutta pääosin menee näin.
Juota nazeen moottoreille menevät pinnit, joko 90ast. tai suorilla pinneillä.
Vastaanottimelle menevät pinnit riippuu systeemistä jota itse käytät, PPM, PWM yms.
Itse käytän PPM:ää, joten juotin nazeen ilman pinnejä vastarille menevät servojohdot kiinni.
Kiinnitin nazen ja virtajakolevyn samoilla pulteilla keskirungon läpi ja samanlaiset muoviprikat
nazen alle eristeeksi ja nylonmuttereilla kiinni. Huomaa nazessa oleva nuoli joka osoittaa nokan
suunnan, halutessa voi nazen suuntaasentoa kääntää ohjelmallisesti.
Perusasetus on siis noparienliittimet eteenpäin.
Tarkista nazen manuaalista moottorien järjestys.
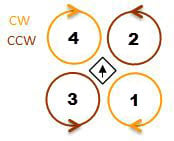
Yläpuolelta katsottuna, perä itseen päin:
Oikea takamoottori = 1 , CW , myötäpäivään
Oikea etumoottori = 2 , CCW , vastapäivään
Vasen takamoottori = 3, CCW , vastapäivään
Vasen etumoottori = 4 , CW , myötäpäivään
Vain yhdeltä noparilta tarvitaan 3 johtoa, joten poista muista nopareista vähintään punainen plus johto.
Itse olen irroittanut signaalijohtimen liittimestä ja suojannut irroitetun johdon pään, näin menetellen sitä
voi vielä joskus käyttää helposti.
Kytke noparien servoliittimet oikeisiin kohtiin nazessa manuaalin mukaan.
Tässä vaiheessa voi rungon kasata loppuun. Jos käytät esim. Mobius kameraa lennon videointiin,
asenna vaimennuskumit ylärungon ja yläkameran levyn reikiin.
Ruuvaa välitolpat M3x6 ruuveilla keskirungon ja ylälevyn väleihin, välirungon puoleisiin ruuveihin hieman
lukitetta ja kiristä sopivasti. Ylälevyä saatat joutua irroittelemaan kun suunnittelet akun paikkaa tai
mahdollisia FPV-kamoja. Ennen ylimmäisten ruuvien kiristystä, laita myös fpv kameran kiinnityslevy
paikalleen. Suunnittele myös akulle paikka.
Säätöohjelma, esim. Baseflight.
Nopea ensisäätö, näillä mini kestää ilmassa, hifistellä voi sitten myöhemmin.
Ohjelmoi mankkaasi pari kytkintä kanaville 5 ja 6, esim. lentotilojen vaihtoon ja armaukseen.
Avaa Chrome selain, lataa Baseflight ohjelma koneelle. Avaa Baseflight, mankka päälle, akku kiinni, yhdistä
tietokone ja naze usbpiuhalla, paina Connect nappia Basessa, pitäisi yhdistää nazeen.
.
-Paina connect nappia ja laita täppi viereisen Auto Connect ruutuun.
-Kalibroi Accelerotometer.
-Tarkista Configuration välilehdeltä pyörimissuunnat, valitse joko PPM tai PWM inputti vastaristasi riippuen.
-Täppä ruutuun: Dont spin motors when armed, jos et halua mottien pyörivän kun armaat nazen.
-Pid Tuning välilehdeltä säädellään gaineja, lentää kohtuullisesti vakioilla, säätöarvoja löytyy vaikka täältä:
http://www.multikopterit.net/index.php/topic,103.0.html
-Reciever välilehdellä tarkistetaan ja säädetään radiot kuntoon, nazen manuaalissa ohjetta eri radioille.
-Mode Selection välilehdeltä säädellään eri kytkimille lentotilat ja mistä haluat nazen armattavan.
-Moottorien toiminnan voi tarkistaa Motor Testing välilehdellä. HUOM, ilman potkureita !
Tässä linkki rev.5 manuaaliin ja samassa ohjeita Baseflightiin.
Kun olet tehnyt muutokset, paina aina Save nappia, muuten ne ei tallennu.
Kun olet mielestäsi valmis, paina Disconnect, irroita usbipiuha nazesta, irroita akkuliitin.
Käynnistä naze uudelleen, anna hetken sen olla initialisoinnin ajan (muutama sekunti).
Armaa valitsemastasi kytkimestä tai kaasutikusta, anna kaasua ja lennä.
Tietoa meistä
Ajankohtaista
Yhteystietomme:
EuroRC Oy
Päiviöntie 8
12400 Tervakoski
044-3397420
[email protected]
www.eurorc.com
FI23527868
Maksutavat












Toimitustavat
